В Японии создали робота-кентавра с парой рук для выполнения разных задач на Луне
Возможность исследования Луны и строительства полноценной базы на её поверхности изучается специалистами разных стран. Внести вклад в колонизацию естественного спутника Земли намерена японская компания GITAI, специалисты которой создали четырёхколёсный роботизированный механизм R1 с руками-манипуляторами, предназначенный для выполнения разных задач на Луне.
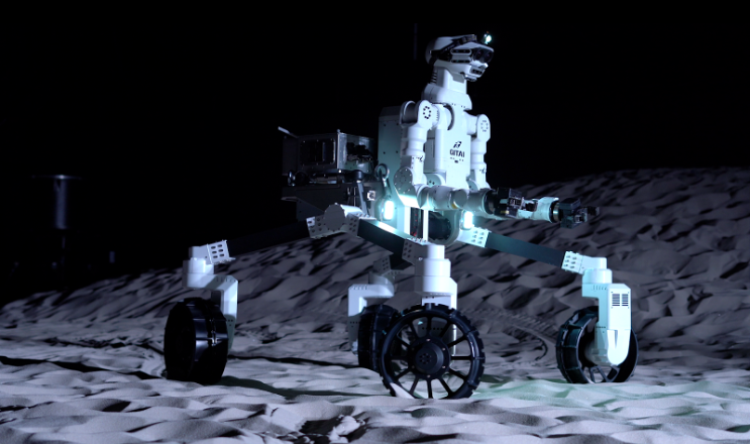
Источник изображения: GITAI
Согласно имеющимся данным, в декабре прошлого года робот-кентавр R1 был протестирован на полигоне Японского агентства аэрокосмических исследований (JAXA), имитирующем лунный рельеф. Отмечается, что в ходе серии испытаний R1 успешно справился с выполнением разных задач, в том числе тестом на мобильность и способность преодолевать препятствия. Он также справился со сборкой солнечной батареи, забором проб ресурсов с поверхности полигона и смог подняться на песчаный холм с уклоном в 15-20°.
В конструкции роботизированного вездехода предусмотрены четыре колеса с углом поворота 360°, которые помогают беспрепятственно перемещаться и успешно преодолевать препятствия. Такой подход позволяет в случае необходимости двигаться боком, а также заезжать на бугры с углом уклона до 20°. В наличии фонарь, руки-манипуляторы и несколько камер. Управление R1 осуществляется оператором, находящимся удалённо и использующим для этого VR-контроллеры.
Что касается GITAI, то японский стартап занимается разработкой роботизированных устройств, которые могут оказаться полезными в процессе освоения космоса человеком. Стартап планирует стать равноправным партнёром ведущих мировых аэрокосмических компаний к 2040 году, создавая недорогих и безопасных роботов для строительства городов на Луне и Марсе.
Источник: